
How Does A Quadcopter Work? A Guide On How Drones Work
How do drones work? More specifically, how does a quadcopter work? There is a very simple answer and a more complex answer to that question.
First the simple answer…
A quadcopter drone really only needs four moving parts to fly. Think of each propeller, shaft and motor as one “moving” part since they are all rigidly connected. The quadcopter receives control commands from the transmitter and sends them to the flight controller.
The brain of the drone is the flight controller. It interprets the commands and sends signals to the motors through electronic speed controllers (ESCs). All flight mechanics of the quadcopter are simply achieved via speed modulation of these motors.
The complex answer will take a little longer. We’ll get into that more below, but first it will take a little background info…
How Does A Quadcopter Work – What You’ll Learn
In this article, you’ll learn:
- Some basic quadcopter components needed for flight
- The physics of flight…what allows an object to fly?
- How a quadcopter generates lift
- Why propellers have a varying pitch
- How a drone hovers
- How a quadcopter rotates/yaws
- Forward and backward flight…or sideways (it’s really all the same)
- Some advanced drone features and how they work
Basic Quadcopter Components Needed for Flight
The beginning of this article mentions some the components needed for a quadcopter to function. The basic ones are: the transmitter, receiver, flight controller, ESCs, motors and propellers. Each of these is explained below.
Transmitter
The controller that you hold in your hands is referred to as the transmitter. The transmitter is what sends a radio signal to the receiver, on the drone. All of your remote control inputs (voltage signals) are turned into electromagnetic signals and sent via the antenna.
Receiver
The receiver is the other half of the radio system. It receives the radio signals sent by the transmitter and outputs them to the flight controller, after converting them back to voltage signals.
Flight Controller
The flight controller is basically the “computer” that controls the quadcopter. It takes inputs from the receiver, its on-board accelerometers, any compass or GPS inputs and outputs the necessary command to the motors. A drone’s flight controller is constantly processing data. It’s continuously adjusting the speed of the motors to keep itself level and oriented during flight.
ESC
The electronic speed controller, or ESC, is what processes the input from the flight controller and provides the power output to the motor. Brushless ESCs have three wires that connect to the motor, they essentially provide three-phase AC power. They work by adjusting the timing of the current sent to the motor’s different windings via three wires.
Motor
Technically, these are the only moving parts on a quadcopter. The motors receive power from the speed controllers and turn the propellers. With hobby drones there are usually two different types of motors available: brushed and brushless. Brushed motors are more simple to control than brushless ones. There also less complex, which is why you find them on most smaller hobby drones.
Larger ones have more room…for things like ESCs, so they use brushless motors. Brushless motors are far superior to brushed ones. They are more efficient, more powerful, last longer and are lighter.
Propeller
The propellers generate the force, or lift, that is needed to get the drone in the air. We’ll get deeper into this in a little bit, but basically the propellers provide a downward thrust that counteracts the force of gravity. One propeller connects to each motor, and they’re spun at very high speeds in order to generate enough lift.
The Physics of Flight
To fully understand how a quadcopter generates lift, you first need a basic understanding of flight physics. Or, what makes an object “fly”. I promise not to get too technical, but even a little bit of physics requires some math.
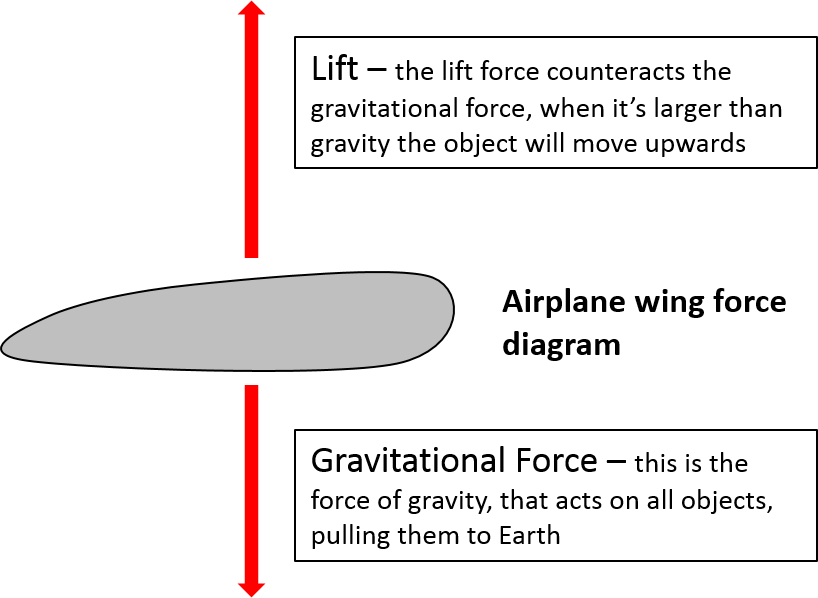
Flight would not be possible without lift. Lift is the upward force generated on an object as it moves through a fluid, in this case air. Lift counteracts the force of gravity.
The standard model of physics says in order for an object to move in any given direction, the sum of the forces on the object in that direction, must be greater than zero. In other words, the lift force needs to be larger than the force of gravity.
So…what provides lift?
On an airplane, lift is achieved with wings. It’s generated by changing the direction of air as it flows over and under the wing. Because the air has to change direction as it flows around the wing, it also changes speed. The change in speed results in localized changes in pressure across the wing’s surface – lower pressure on the top and higher pressure on the bottom.
If you add up all of these localized pressures across the whole surface of the wing, the result is a net force. When the pressure beneath the wing is greater than the pressure above it, the net force is upwards. That force is called lift (if it was downwards, it would be called downforce).
This behavior is the basis of airfoil theory. So, what does this have to do with a quadcopter?
We will cover that next.
How a Quadcopter Generates Lift
A quadcopter generates lift by producing thrust from its propellers, and it’s proportional to the rotational speed of the propellers. The faster the rotation, the more lift generated.
Thrust is a mechanical force generated by accelerating a mass of fluid and it’s explained by Newton’s 3rd Law of Physics. Basically the fluid is accelerated in one direction, and the object accelerating the fluid accelerates in the opposite direction.
For every action, there is an equal but opposite reaction.
The gritty details of propeller dynamics are extremely complex. Check out this quadcopter simulation video from NASA and you’ll see for yourself.
To simplify it, you can think of a propeller as a rotating wing…because it basically is. Most propellers have some sort of airfoil shape.
And we know that the pressure on the top of a (lifting) wing is lower that the pressure under it, when it moves through a fluid such as air.
To simplify it even further, when a propeller rotates you can think of it as a disk that does work on the airflow. A higher pressure is created beneath the disk and the speed of the air is also increased as it passes through the disk.
Knowing all of this, we can use some physics to show how thrust is related the differences in speed and pressure of the air before and after it has passed through the propeller disk. We’ll do this using the Bernoulli equation (shown in the graphic below).
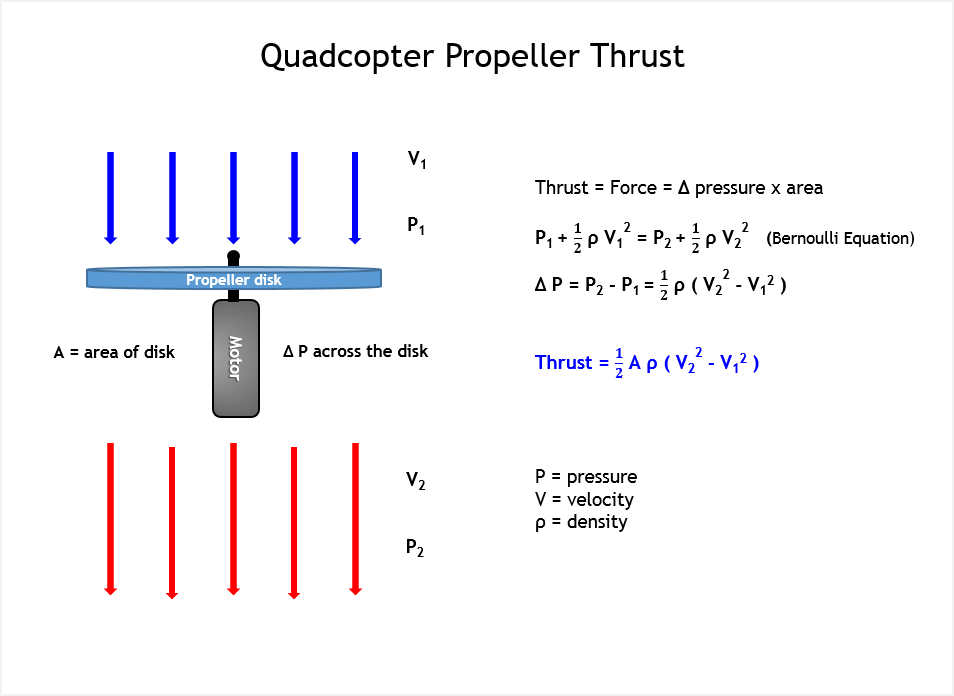
The equation basically says that the difference in fluid pressure between two points is proportional to the difference in fluid speed across those same two points.
So, the larger the speed difference the larger the pressure difference will be. It’s this pressure difference that acts on the bottom of the “propeller disk” to create the lift, or thrust.
Pressure is defined as a force divided by the area it acts on, so we can use the area of the disk to determine the force (thrust) at any given pressure.
Why Propellers Have a Varying Pitch
In the previous section, I said you could think of a propeller as a rotating wing. Well, that’s only partly true. A wing is usually rigid, and all parts of it move through a fluid at the same velocity. This means that the speed of air flowing over the wing is basically the same all along its length.
This is not true with a propeller. Since a propeller’s motion is rotational, the linear speed of the tips of the prop is much, much faster than near the its hub. So the air flows across the propeller blade much slower near its center as compared to the blade tips.
Most propellers compensate for this by having a varying pitch to their blades. This pitch is larger at the hub and gradually gets flatter as you move towards the end of the propeller.
By increasing the pitch, or angle of attack of the propeller, more lift is generated for the parts moving at a slower speed and the prop becomes more efficient.
How a Drone Hovers
Modern drones are able to hover easily because they have a whole bunch of sensors mounted to the flight controller circuit board.
If you’re interested in a drone that has excellent hovering ability, check out our Ryze Tello Drone Review.
Some of the sensors used are called accelerometers, and they’re able to measure how much an object accelerates in a given direction. Usually, there are three of these accelerometers – that sense accelerations in the x, y & z directions. (forward/back, left/right, up/down)
A quadcopter flight controller uses data from these sensors to know if it is level in relation to Earth. The computer makes minute adjustments to individual motor speeds to keep the drone oriented in the correct position.
That is how a drone stabilizes itself while hovering, but how does it hold its position? It’s done with a feature called position control, and not every drone has it. For those that don’t, the skill of the pilot is used to make small adjustments to the controls, keeping the quad in the desired position.
More advanced quadcopter drones do have position control and it’s done with either GPS or something called optical flow positioning.
Hovering with Accurate Position Control
GPS position control uses a GPS receiver mounted on the drone to provide it’s exact location on Earth. The flight controller then uses this data to maintain its current position. If the GPS signal shows the drone is drifting in any direction, the flight controller can gently move the drone in the opposite direction to keep it in the same spot. Unfortunately, this feature usually only works well outdoors, when there is a clear view of the sky.
Optical flow positioning though, works both indoors and outdoors. Although it does only work when close to the ground, and when there is a bright clear view of some sort of pattern on the ground.
This is because optical flow positioning uses cameras to “see” the ground. This is where the pattern comes in. The flight controller needs some sort of contrast from the camera, to determine if the drone is drifting.
If the drone starts drifting in any direction, the flight controller will make adjustments to bring it back to a stable position.
Part of what allows a helicopter and quadcopter drone to hover is also the same thing that allows it to rotate…or yaw. Read on to the next section to understand how a drone rotates.
How a Quadcopter Rotates/Yaws
Did you know that if a helicopter didn’t have a tail rotor, it wouldn’t be able to fly at all? The body of the helicopter would just spin around in the opposite direction as the propellers. Just like thrust that we talked about earlier, this is also due to Newton’s 3rd Law of Physics.
Since the motor applies a torque to the propeller shaft to spin it, an equal torque acts on the helicopter itself, in the opposite direction. Without anything to counteract this reaction torque that act on the helicopter, it would just spin in the opposite direction as the propeller.
The exact function of a tail rotor is to provide a thrust that counteracts this reaction torque, and keeps the helicopter’s heading where the pilot wants it to be. The tail rotor speed increases to rotate the helicopter in one direction, and decreases to rotate it in the other.
Decreasing the speed allows the natural reactionary torque to act on the helicopter and rotate it. Increasing the speed creates a thrust that, combined with the perpendicular distance from the main propeller shaft, produces a torque that overcomes the reactionary torque and rotates the helicopter in the opposite direction.
So what about helicopters that have no tail rotor but more than one propeller, how do they fly without spinning?
Keeping the Torque in Balance
These helicopters are able to fly normally because the propellers are spinning in opposite directions, which cancels out any reactionary torque. This is exactly the same way a quadcopter is able to hover without constantly spinning around in circles.
If you’re into quadcopters at all, you’ve probably noticed that not all of the propellers are pitched in the same direction. This is because two of the propellers clockwise and the other two spin counter-clockwise.
On an X-type quadcopter configuration, the motors and propellers on the diagonals spin in the same direction. So the front left and right rear spin in the same direction and the front right and left rear spin in the opposite direction.
With this configuration, all of the reactionary torque acting on the motors cancels itself out and there is no net torque acting on the quadcopter – so it does not rotate.
Now, while hovering, what if the two motors spinning clockwise reduced their speed?
This means that the counter-clockwise motors would be producing a larger torque.
So the equal, but opposite torque acting on the quad would be in the clockwise direction. And, it would be larger than the reactionary torque acting in the other direction (from the motors that were slowed down).
The result is a net torque acting on the quadcopter in the clockwise direction.
So, the quadcopter would rotate, or yaw, in that direction.
There is just one small problem.
Since the speed of two motors was reduced, the total lift acting on the quadcopter is also reduced. If holding a stable hover, the quad would no longer be in equilibrium and would start to descend.
But what if at the same time two of the motors were slowed down, the ones spinning in the opposite direction were sped up?
If they were sped up enough, there would be no total reduction in lift and the quadcopter wouldn’t lose any altitude.
This is exactly the method used to rotate or yaw a quadcopter. The flight controller changes the speed of the motors, in pairs, in order to maintain lift but change the torque acting on the quadcopter.
This is all done based on the input from the controller, or from an autopilot system. The flight controller makes all the necessary adjustments to the speeds, based on the directional input it gets.
How a Drone Flies Forwards or Backwards
For a quadcopter, flying laterally (without rotating) in any direction is really all the same. It’s just that a different pair of motors are used to move the drone in any of the four directions.
I’ll use forward motion for my example but it’s the same principle applied to the other three directions.
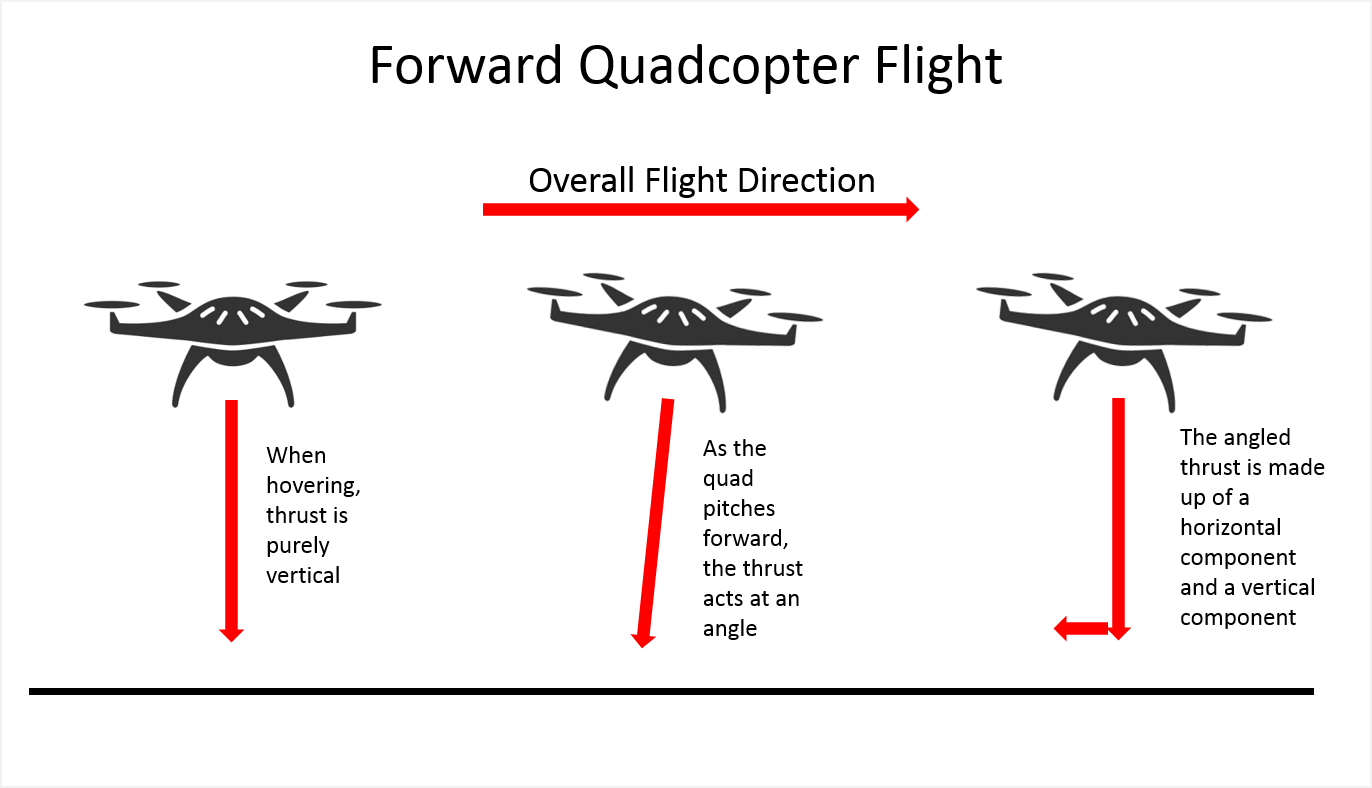
The pitch control from the transmitter controls the forward and backward movement of the drone. When you push the stick forward, or pitch forward, the speed of the two rear motors increases.
This tilts, or pitches, the quad forward a little at a small angle. When that happens, the thrust vectors from the propellers are no longer at right angles to the ground. i.e., they’re not pointing straight down.
When the force acts at an angle, it gets split up into two components – one acting in the vertical direction and the other in the horizontal direction. It is this small force, acting in the horizontal direction, that acts on the quadcopter to move it forward.
Moving in the other three directions uses different motors, but the same method. To move backwards, the speed of the front motors increase, moving left uses the right ones and so on.
Basically, the motors opposite of the direction of travel are used to move the quadcopter in any lateral direction. It’s pretty simple.
Some Advanced Drone Features and How They Work
A lot of the features only found on a lot more expensive drones are now available on lesser expensive hobby/toy models. This is good because there are some pretty cool features out there.
Like if your drone has a GPS and a compass. These two “sensors” provide enough information to the drone’s flight controller to enable autonomous flight.
It works like this:
The compass provides the heading. It tells the flight controller which way the quadcopter drone is facing. The GPS sensor provides the position and direction of travel. In fact, these two devices are so critical to each other that a lot of drones used an integrated GPS/compass module, the unit is one in the same.
Like mentioned earlier, the feedback from both the compass and the GPS module enables automatic flight using a PID control system. Speed, direction and altitude are all compared against commands the flight controller sends.
Adjustments made to the flight controls achieve the desired motion or position. This is the basis of how all control systems work.
Having this autonomous capability is what allows features like accurate return to home, autonomous waypoint flight, precise position control, follow me, etc..
But the latest form of position control and autonomous flight utilizes a lot of cameras, sensors and some pretty advanced technology…
Seeing is Believing
On some of the really advanced consumer drones, multiple sensors are incorporated, which allows for object recognition and collision avoidance.
Drones are now mounted with a host of sonar/ultrasonic, infrared and camera sensors that allow it to “see” its surroundings. Advanced algorithms, in the flight controller, are able to tell the difference between different objects like people, trees, vehicles, walls, terrain, etc…
These algorithms use the information from the sensors as well as from GPS to avoid obstacles while flying an automated path. Some drones can even create a 3D map of their surroundings and actually “choose” the best path! Amazing.
The camera’s object recognition allows object tracking too. The drone can follow a specific object, or vehicle, keeping the main video camera focused on it, all while avoiding obstacles on the way!
Hopefully the advancements keep moving forward, allowing the features to become more and more available on some of the more affordable drones.
So now you know the basics of how a drone works. If you’ve read this far, I hope this article was useful and provided some info that you didn’t already have.
If you like what you’ve read, please feel free to share or leave a comment below.