
How to Fly a Quadcopter Drone – A Beginner’s Guide
Learning how to fly a quadcopter drone, or other multirotor drone is not as difficult as it seems. In this article we’ll cover how you can learn to fly your drone manually, without the aid of GPS or other autonomous functions.
As with anything, it’s always good to learn the foundation first. It’s like in school when you had to do math problems the long way before you were allowed to use a calculator.
Learning to fly a quadcopter manually doesn’t just help you understand how the drone works. It also provides a failsafe in case your automated guidance systems fail – which can and does rarely happen.
What happens when your drone is at 200 ft and your GPS fails, rendering your return to home inoperable? Wouldn’t it be helpful to be able to switch to manual mode, and land your quadcopter safely? Most definitely, yes.
Don’t have drone yet? Check out our article…the best place to buy a drone.
What You’ll Learn
This article covers a large range of topics. It covers everything from the basic quadcopter terms and controls to step by step instructions for your first few flights.
Here’s what you’ll learn:
- RC drone and quadcopter terminology, definitions and components
- Basic RC quadcopter flight controls
- Transmitter functions and control configurations
- How to pick a location for flying your quadcopter
- Pre-flight drone safety checks and precautions
- Flight mode selection
- How get your quadcopter to take off
- How to hover a quadcopter steadily
- Learn how to land a quadcopter
- Forward and lateral quadcopter flight
- How to fly a quadcopter in a square pattern
- Yaw control – using the rudder to rotate a quadcopter
- How to maintain your quadcopter’s flight orientation
- How to make coordinated banked turns with a quadcopter
- Some things to practice to hone your skills
Basic Quadcopter and RC Drone Components
Before you get started learning to fly your drone, it really helps to understand the basic parts and functions of the hardware you are attempting to control.
If you understand how it all works together, learning to fly your quadcopter will hopefully go that much smoother.
I will save a more detailed description of some of these components and how they work for a later article, for now we’ll just focus on the high level. But if you’re interested now, check out this article on how a quadcopter works.
Here some basic quadcopter components and terms:
Frame
This is the body, or chassis of the quadcopter. It contains most of the wiring, as well as the flight controller, GPS module, compass and receiver. The quadcopter’s LiPo battery also attaches to the frame, either in a compartment or externally.
Arm
Extending from the quadcopter frame are the quad’s arms. The arms really only have one purpose, to provide a mounting location for the motors. For obvious reasons, the distance between any 2 motors must be greater than the propeller diameter being used.
Motor
The motors are one of the only actual moving parts on a quadcopter. The motors are used to spin the quad’s propellers, which in turn produces lift. Most medium size and up consumer drones, utilize brushless electric motors. If you count the motor and propeller together as one part, a quadcopter really only needs 4 moving parts in order to fly.
Propeller
As stated above, the propellers are attached to the quadcopter motors – and spin together as one unit. The propeller surface has a certain pitch to it. So when it spins in the right direction, it produces lift. On most quadcopters, propellers diagonally from each other spin in he same direction – with one pair spinning clockwise and the other spinning counterclockwise.
Flight Controller
Basically, the brain of the quadcopter. The flight controller is what controls the motors, but also does so much more than that. It takes control commands from the receiver process them, and send the proper signals out to spin the motors. The flight controller also process all sensor input; adjusting the control to stabilize the quad, maintain its position, etc…
ESC
ESC stands for Electronic Speed Controller. Without one, your quadcopter’s motors would not be in sync when you applied the throttle. The ESCs are what allows the quadcopter flight controller to vary the motor’s speed so precisely. The ESCs are usually located in aquadcopter’s arms, connecting the flight controller to the motors.
Landing Skid
Also known as a quadcopter’s landing gear. A quad’s landing skid is simply a set of legs, attached to the bottom of the drone, that allow it to land. Similar to a helicopter, the skids make contact with the ground instead of the belly of the drone.
Transmitter
The controller. The transmitter is what the pilot holds in their hand, and actually flies the quadcopter with. The transmitter sends a radio signal to the receiver, on the drone, containing the control instruction. Pitch forward, roll left, throttle up, etc…
Receiver
The component on the quadcopter that receives the radio signal from the transmitter. The receiver is connected to the flight controller and sends it the control signals.
Heading
A vehicle’s heading is the direction that the front of it is facing. Heading is usually measured in degrees, like on a compass. So, if your quadcopter was facing due north, its heading would be 0 deg.
Note that for a rotor aircraft, its heading does not have to be the same as the direction in which it’s moving. This is because rotor aircraft do not require forward movement to generate lift, like planes do. They have the ability to hover and rotate around their vertical axes. This ability enables flight in any direction.
Basic Quadcopter Flight Controls Explained
There are only 4 basic flight controls that allow a quadcopter, or any other drone, to fly through the air. You may have seen some pretty advanced drone flight maneuvers but it all boils down to these 4 controls being used together.
They are: lift, pitch, roll and yaw. Each of them is explained below.
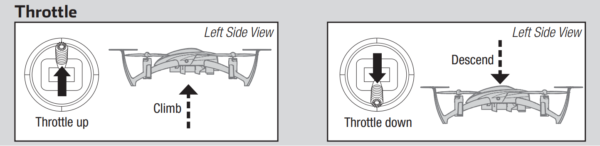
Lift is controlled by the transmitter’s throttle control. Increase the throttle (props spin faster) to ascend and decrease the throttle (props spin slower) to descend.
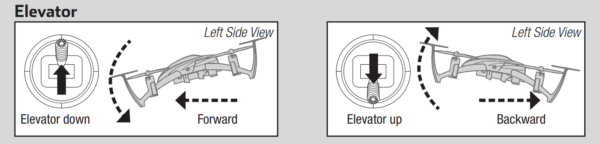
Pitch is controlled by the transmitter’s elevator control. Pitch is what’s needed to move the quadcopter forward and backward. Push forward (pitch nose down) and the drone will move forward. Pull backward (pitch nose up) and the drone will move backwards.
Roll is basically the tilt of the quadcopter, left or right, and is controlled by the aileron control on the transmitter. Move the stick left to roll the quad and it will move left. Roll it to the right and it will move right. Using the roll control does not affect the direction the drone is facing. Its heading will not change.

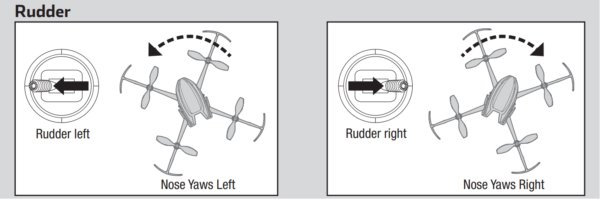
Yaw determines the quadcopter’s heading and is controlled by the transmitter’s rudder control. It’s what makes the drone rotate. Yaw left to make the quadcopter rotate its nose to the left and yaw right to make the nose rotate to the right. When hovering, yaw should not have any effect on lateral movement…in theory. It should just serve to rotate the nose in the desired direction.
Transmitter Control Configurations
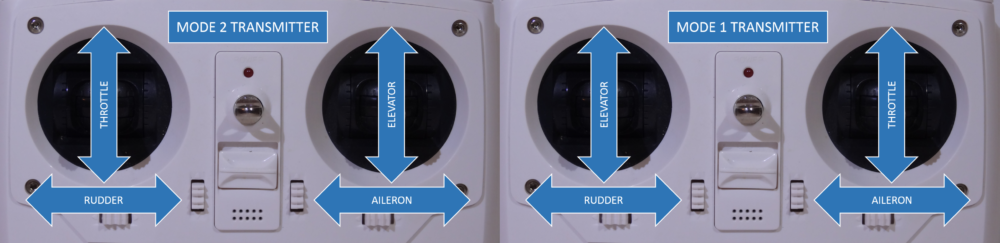
There are 2 basic types of transmitter “Mode” configurations: Mode 1 and Mode 2. Mode 2 is probably the most widely used and accepted configuration but you can still get most drones in a Mode 1 config.
Mode 2 simply means that a transmitter’s rudder and throttle are controlled by the same stick – the one on the left.
Throttle is in the forward and backward directions. The stick holds its position when moved, it does not return to center. Left and right movements of the stick control the rudder (yaw). Internal springs force it back to center, when released.
The right stick, on a Mode 2 setup, controls the elevator (pitch) and aileron (roll) of the drone. Elevator is controlled with forward and backward movement and side to side movement of the stick handles the aileron control. Both directions utilize springs, so the stick will return to center when released.
In a Mode 1 setup, the throttle and elevator are switched. Left stick has rudder and elevator while throttle and aileron are on the left.
For the purposes of this guide, all instructions will be given assuming a Mode 2 transmitter.
Picking a Good Location to Fly a Quadcopter
When learning how to fly a drone, it’s a good idea to pick a place where you won’t have a lot of distractions. Getting familiar with the controls takes a lot of concentration. You want to be able to focus on the task at hand.
Don’t try to fly your quadcopter in a crowded area, or around a lot of obstacles.
Also make sure that you are at least 5 miles from the nearest airport. If you’re not, the FAA requires that you notify the control tower of your drone flight.
Your best bet is a large open area that is somewhat crash friendly…soft Earth. Think grass field instead of concrete.
When you first start flying, you’ll be trying to keep the quadcopter relatively close to the ground. A 10 foot fall onto grass and you might be OK. But a crash from that height onto concrete could easily break something.
Make sure there is little to no wind too. You don’t want your quadcopter being tossed around when you’re learning how to fly it.
Wait until you’ve got some more experience and are more comfortable, before taking it out when it’s breezy.
If you have a mini drone, you can learn to fly indoors too. Just use a large open room, preferably with a high ceiling. You don’t have to worry about the wind when you’re inside!
Drone Pre-Flight Checklist
It’s a good idea to get in the habit of following a safety check before each time you fly.
Many crashes and fly aways, that beginner pilots experience, can be attributed to user error or bad preparation. A bad or missing accelerometer calibration, for example, can wreak havoc on your ability to hover and fly straight.
If the quadcopter doesn’t think it’s level, it will try to compensate. This can result in the drone constantly trying to fly away in a given direction.
All it takes is a few minutes to check everything out on your quadcopter and make sure you’re good to go. Do the diligence up front, to ensure you have a smooth flight experience.
It’s what every pilot does before they fly and you should do the same before you fly your drone.
Here is a good drone pre-flight safety checklist you can start with:
- Ensure your quadcopter’s battery is charged and secure.
- Transmitter batteries are charged/fresh. You want maximum range, full transmitter power. Weak batteries will reduce the power output and your range.
- Check that the antennae on both the drone and the transmitter are not obstructed.
- Inspect the quadcopter, make sure there’s nothing loose or damaged. Check the landing gear and make sure it’s secure.
- Look to see if the propellers are installed correctly for proper rotation and are tight. Make sure there are no nicks or chunks missing and the props are not bent.
- If your quadcopter requires its compass and accelerometers to be calibrated, make sure it’s complete and done correctly. This can have a huge effect if not done, or done incorrectly.
- Be aware of your surroundings before you takeoff. Make note of where people, structures and other potential obstacles are. Remember that you are responsible for making sure you’re not putting anybody or their property at risk.
- Be aware of any potential electromagnetic interference. Most transmitters use the 2.4 Gz frequency which is the same as Wi-Fi, some cordless phones and some baby monitors. A running microwave can also disrupt a 2.4 Gz signal. It’s also not a good idea to fly your quadcopter near high voltage wires or in close proximity to radio towers.
Following a good pre-flight checklist before you fly your quadcopter isn’t complicated. It really just comes down to awareness and following the steps. Every. Time.
It’s basically just making sure your hardware and environment can support a safe flight…that’s it.
How to Fly a Quadcopter
So you’ve checked out your drone, familiarized yourself with the flight controls, selected a flying location & gone through the pre-flight checklist. Now you are ready to fly.
As I mentioned earlier, this guide will show you how to fly a quadcopter without relying on automatic flight controls and GPS position holding. Make sure these modes are off…switch your control to manual or stabilized.
Place the drone on the ground, facing away from you. It’s best to start off this way, so that you have the same perspective of the quadcopter. We’ll cover flying in different orientations a little later.
How to Take Off and Hover a Quadcopter
This section will show you how to takeoff and hover your drone.
- Slowly push the throttle (left stick) forward until the propellers start spinning.
- Steadily increase the throttle until the drone lifts off the ground.
- Get a good feel for the throttle’s sensitivity. Try to make small adjustments to hold the quadcopter’s height steady.
- If the quad starts to wander in a given direction, gently move the left stick in the opposite direction to cancel out the motion.
- Try to keep the drone hovering in the same spot, about 5-6 feet off the ground, for as long as you can.
Depending on the size of your quadcopter, hovering lower than 5 or so feet could be more difficult. This is due to the propeller wash hitting the ground and causing all sorts of turbulence.
Again, the goal here is to get a good feel for the sensitivity of the controls. Try to use small, smooth movements of the sticks to keep the quadcopter where you want it.
A Note On Flight Trim
Flight trim is used to apply a flight control, without having to apply pressure to the sticks. With an RC quadcopter or plane, the trim adjustments are usually located on the transmitter – below and beside the sticks.
Moving the adjustment one click in either direction will apply a small amount of input in that direction, and it will stay that way until the setting is “trimmed’ back in the opposite direction.
This can be useful if your quadcopter always drifts to the same direction, for example.
Some drone flight controllers have an autotrim (or flight control calibration) capability. This is where the computer inside the quadcopter itself can be put into a mode that “learns” the necessary adjustments.
If your quadcopter has some sort of autotrim (like this one), I highly recommend using it instead of any trim settings on your transmitter. Using both can lead to the settings fighting each other and erratic flight behavior.
How to Land a Quadcopter
Ok, so you’ve got your drone in the air and you’ve manage to hover it in one spot…now what?
Landing a quadcopter can be intimidating at first. But the steps below will show you how to do it consistently and in a controlled way. Nice and easy.
Here’s how to land:
- Using your hovering skills, try to keep the quad in the same position while slowly reducing the throttle until it begins to descend.
- Don’t descend too quickly. Gently increase the throttle if you have to. Aim for a smooth descent.
- Get closer and closer until your landing skids are about 1-2 inches above the ground.
- While holding the position steady, cut the throttle and your quadcopter should drop the remaining distance, settling nicely on the ground.
Trying to gently descend the remaining 1 – 2 inches is hard to do, when you’re just beginning to fly.
Sometimes it’s hard to keep the quadcopter in a steady hover. It’s really easy to bounce it and end up flipping it, in that situation.
The sound of propellers scraping on cement will make you cringe for sure. Plus, crashing your quadcopter when it’s 2 inches above the ground doesn’t exactly make for a good story.
It’s best to use this method until you can build your precise hovering skills.
Forward and Lateral Quadcopter Flight
Once you’re able to hover and land your quadcopter, the next thing to learn is flight in the forward, backward and side to side directions. For this, you will be using the pitch and roll controls.
Here are the steps:
- Take off, again with your quadcopter facing away from you and hover.
- Pitch forward by gently pushing the right stick away from you. The quad will fly forward.
- Pull the right stick back towards you to pitch in the reverse direction. Fly back to your takeoff position and hover.
- Push the right stick to the left to roll the quad left. Roll back to the right by pushing the stick to the right.
- Bring the quadcopter back to your takeoff position and land.
How to Fly a Quadcopter in a Square Pattern
Put everything together you’ve learned so far, and fly your quadcopter in a square.
At this point you still want to keep the front of the drone facing away from you throughout the flight. Rotation and yaw control will be covered in the next section.
Here’s what to do…remember to try and keep a steady altitude, and use gentle input on the sticks:
- Take off and hover.
- Pitch the quadcopter forward (push the right stick away from you).
- Fly forward, stop and hover.
- Roll the quadcopter to the left (push the right stick to the left), stop and hover.
- Pitch the quadcopter backwards (pull the right stick toward you).
- Fly back approximately the same distance you flew forward in step 2, stop and hover.
- Roll the quadcopter to the right (push the right stick to the right).
- Fly back to your takeoff position, stop, hover then land.
Yaw Control – Using the Rudder to Rotate a Quadcopter
Up until now, you may have noticed that this guide hasn’t really focused on yaw control. (the other function of the left stick, besides throttle)
So far, we’ve only focused on flight where the your perspective was the same as the quadcopter’s. Your left is its left, and your right is its right, etc..
Once this perspective changes, it can be disorienting for the pilot and requires a lot more concentration.
This is because you have to think about the direction you want the quadcopter to go and the direction you need to move the sticks. Once your perspectives differ, it won’t always be the same.
Like when the quadcopter is facing towards you. Now all the controls will be reversed from what they were when it was facing away from you.
To get familiar with rotating your quadcopter, perform the following practice flights. Start off with the quadcopter facing away from you:
- Take off and hover.
- Push the left stick to the left to rotate the quadcopter 180° until it’s facing you (you may have to make small adjustments to the throttle, pitch and roll to keep the quad in the same spot).
- Hover in place for 10 seconds.
- Push the left stick to the right and rotate 180° until the quadcopter is back in its original position…and land.
- Rinse and repeat, but reverse it this time.
How to Maintain Your Quadcopter’s Flight Orientation
In this exercise, you’ll just be using the quadcopter pitch and yaw controls. This will help you to get comfortable with flying from the perspective of the drone.
Try to imagine yourself inside the cockpit of the quadcopter. If you can visualize it in this way, the controls will come more natural and will be less disorienting.
- Take off, rotate (yaw) the quadcopter so it’s facing left and fly in that direction.
- Stop and rotate 180° to face right.
- Fly forward in that direction.
- Fly quadcopter back and forth a few times, stopping and rotating 180° each time.
- Come back to the center position and rotate until the quadcopter is facing forward.
- Pitch forward to fly away from you.
- Stop, rotate 180° and fly back towards you.
- Fly forward and back a few times, then return to your center position, rotate forward and land.
How to Make Coordinated Turns with a Quadcopter
Using the yaw and roll controls independently is a very effective way to position a drone where you want it.
But flying this way does seem a little robotic.
If you really want to look like a pro and have a smooth, fluid flight path you need to make coordinated turns.
A coordinated (or banked) turn is one where the roll and yaw controls are used together to execute a smooth, curved-path turn. Just like in a real helicopter or plane.
To put it another way, in a coordinated turn, the quadcopter’s heading is oriented with its flight path.
To perform a coordinated turn, gently apply both yaw and roll in the same direction to bank the quadcopter through a turn. Try it out. Get in the air and do these steps:
- When flying forward, begin to roll the quadcopter left or right.
- While rolling, gently apply some yaw in the same direction.
- Note how the quadcopter starts to bank and turn in that direction.
- Return the roll and yaw back to center and level out.
- Try executing a turn in the opposite direction. You may have to practice a bit to get a feel for the right amount of stick input needed to turn smoothly.
Fly back and forth a few times, performing these turns, until you get a good feel for using all four flight controls at the same time. Remember to visualize yourself inside the drone so you don’t get disoriented.
Practice Some More Advanced Quadcopter Maneuvers
If you’re comfortably performing the flights above with your quadcopter, you probably have a good feel for the controls by now. Go ahead and try some maneuvers that are a little harder.
Here are some good things to practice, that will make you an even better drone pilot:
Fly Longer Distances
Try to maintain proper quadcopter orientation at longer distances. Fly at an increasingly longer distance from you, while keeping track of the direction your quad is facing.
This can be a little difficult at first, but with practice it becomes easier. Make some banked turns with the quad while the drone is facing different directions.
Higher Altitude Flight
Increase the altitude of your flights. Again, the goal here is to not lose track of your heading. If your quadcopter is white, it can be pretty easy to get disoriented when it’s up against the clouds.
A good way to find your orientation again is to yaw the quad a little while flying forward. You should see it turn a bit and be able to pick up the flight track again.
High(er) Speed Turns
Try making sharp turns at a relatively fast forward speed. Quickly yaw the quadcopter to make the turn, while still pitching forward.
Once your quad completes the rotation, it will still be moving sideways in the direction you were just flying. Use the roll control to cancel out that motion and complete the turn.
Using all of these controls at the same time will take some quick movement of your fingers on the sticks. But practice and it will only improve your controller skills.
Pirouettes
Take off, hover and perform some pirouettes. Spin the quadcoper in 360° rotations, while maintaining the same position.
This will require use of all 4 flight controls at the same time. Use the throttle to maintain your altitude and the pitch and roll controls to stop the quad from wandering while it’s yawing.
Figure Eights
This is a good exercise to practice tight coordinated turns. From a hover, try to fly in a figure eight pattern.
Start off in one direction, fly forward, loop around and back towards you crossing your original path. Loop back around, and fly back towards your starting point to complete the eight.
Practice this one until you can complete a symmetrical eight pattern.
Obstacle Course
If you have an indoor drone, you can set up a small obstacle course and fly around/through it. If you’re going to try this, it’s probably a good idea to use a quadcopter with propeller guards.
Set up a small course and see how fast you can fly through it. Keep practicing and try to improve your time.
I hope you’ve enjoyed our beginner’s guide on how to fly a quadcopter drone. The skills shown here will not only make you a better drone pilot, it will also give you the confidence being able to fly your quadcopter if your autopilot fails or is not available.
As always, it’s best to learn the foundation of something first. It’s very tempting to just switch on the autopilot and get flying right away with your new drone. But if you take the time to learn to fly manually, you will have those extra skills that can be applied if needed.
Thanks for reading and, as always, if you have any comments, questions, or first flight tips I’d love to hear them. Please leave a comment below!
I’m really glad that I’ve found this article. Even someone with a little time under their belt can still further their knowledge.
I’m currently using the 3DR Solo drone and I think it’s a lot of fun. It fast, easy to fly, and I can attach my GoPro to it 😉
I think that it’s really important for people to understand that yes drones are fun to fly they can really be dangerous if you do not know what you are doing. Furthermore, I know plenty of people who have flown their drones into power lines, buildings, lost signal and it went crazy and crashed, or the battery died because they were not paying attention.
All of this mishaps could have easily been avoided.
I also believe that it is important to spend the time on ground getting to know your drone, doing your pre-flight inspection, and choosing an appropriate location.
All of these will insure that your drone stands a much better chance of taking off and most importantly touching back down in one piece.
Take your time learn as much as you can on the ground because this makes everything a lot easier once your in the sky.
This article is an essential must read for all future and current drone pilots.
I couldn’t agree with you more. I’ve had a few crashes myself due to GPS issues, until I installed a telemetry system to actually let me know the quality of my signal before using any GPS modes.
The Solo is a cool drone, I like that it uses the Ardupilot open source software. I have a modified Quanum Nova, that also runs Ardupilot. It’s nice to be able to calibrate and tweak the settings here and there.
My little brother really like doing high speed turns
But it takes time to master. I also think of getting a drone for my bro’s birthday. Do you have any suitable drone recommendation which can do high speed turns easier?
Hi Furkan, the DJI Phantom line of drones have a sport mode that makes them super agile. You can check some of them out in our article here http://thercdronehub.com/best-drones-with-a-camera-and-gps/.
Wow, this website is very informative. I will definitely have my sons take a look at it. Very good niche!
Good luck!
Thank you for checking out the site!